Topology
Table of Contents
- 1. Topological Space
- 2. Product Topology
- 3. Base
- 4. Neighborhood
- 5. Homeomorphism
- 6. Compactness
- 7. Separation Axioms
- 7.1. Topologically Distinguishable
- 7.2. Separated
- 7.3. Separated Subset
- 7.4. Definitions
- 7.4.1. Kolmogorov (T₀)
- 7.4.2. Symmetric (R₀)
- 7.4.3. Fréchet (T₁)
- 7.4.4. Preregular (R₁)
- 7.4.5. Hausdorff (T₂)
- 7.4.6. Urysohn (T₂½)
- 7.4.7. Completely Hausdorff (Completely T₂)
- 7.4.8. Regular
- 7.4.9. Regular Hausdorff (T₃)
- 7.4.10. Completely Regular
- 7.4.11. Tychonoff (T₃½)
- 7.4.12. Normal
- 7.4.13. Normal Regular
- 7.4.14. Normal Hausdorff (T₄)
- 7.4.15. Completely Normal
- 7.4.16. Completely Normal Hausdorff (T₅)
- 7.4.17. Perfectly Normal
- 7.4.18. Perfectly Normal Hausdorff (T₆)
- 8. Countability Axioms
- 9. Manifold
- 10. Fiber Bundle
- 11. CW Complex
- 12. Euler Characteristic
- 13. References
1. Topological Space
- Geometrical Space in which "closeness" is defined, although it cannot be measured.
- \((X, \tau)\)
1.1. Definition
1.1.1. Via Neighborhoods
- This axiomatization is due to Felix Hausdorff
- A neighborhood topology \(\mathcal{N}(x)\) maps a point \(x\in X\)
to a non-empty collection of subsets of \(X\)—the neighborhood of \(x\) with respect to
\(\mathcal{N}\)—
with following axioms:
- \(N\in \mathcal{N}(x) \implies x\in N\)
- \(N \subset X\) and \(x\in N \implies N \in \mathcal{N}(x)\)
- \(N, M \in \mathcal{N}(x) \implies N\cap M \in \mathcal{N}(x)\)
- \(\forall N \in \mathcal{N}(x), \exists M \subset N: (y \in M \implies N \in \mathcal{N}(y))\)
1.1.2. Via Open Sets
- A topology \(\tau\) on a set \(X\) is a collection of subsets of
\(X\) which called open sets, with following axioms:
- \(\varnothing \in \tau\) and \(X \in \tau\)
- Closed under any finite or infinite union
- Closed under any finite intersection
1.1.3. Via Closed Sets
- By De Morgan's laws, the definition via open sets
becomes:
- \(\varnothing\) and \(X\) are closed
- The intersection of any finite or infinite collection of closed sets is closed
- The union of any finite collection of closed sets is closed
1.2. Closed Set
- \(C\subseteq X\) is closed in \((X, \tau)\), if \(X\setminus C \in \tau\) which means it is an open set.
1.3. Dense Subset
1.3.1. Definition
A set \( A\subset X \) of a topological space \( X \) is dense if any of the following is satisfied:
- The smallest closed subset of \( X \) containing \( A \) is \( X \) itself.
- The closure of \( A \) in \( X \) is equal to \( X \) .
- The interior of the complement of \( A \) is empty.
- Every point in \( X \) either belongs to \( A \) or is a limit point of \( A \) .
- For every \( x\in X \) , every neighborhood \( U \) of \( x \) intersects \( A \) .
- \( A \) intersects every non-empty open subset of \( X \) .
- And more…
2. Product Topology
- Cartesian product of a family of topological spaces equipped with a natural topology called the product topology.
2.1. Definition
- For a nonempty family of topological space \(\{X_i\}_{i\in I}\),
- The product space is the Cartesian product: \[ X := \prod_{i\in I}X_i \]
- equipped with the product topology, somtimes also called Tychonoff topology, that is defined to be the coarsest topology for which all the canonical projections \(\pi_i^\natural \colon X \to X_i\) are continuous.
3. Base
- Basis, pl. Bases
3.1. Definition
A base for the topology \(\tau\) is a family \(\mathcal{B}\subseteq \tau\) of open sets such that every open set of the topology can be represented as the union of some subfamily of \(\mathcal{B}\).
Equivalently, a family \(\mathcal{B}\) of subsets of \(X\) is a base for the topology \(\tau\) if and only if \(\mathcal{B}\subseteq \tau\) and \(\forall U\in \tau, \forall x\in U, \exists B\in \mathcal{B}, x\in B\subseteq U\).
3.2. Properties
- Euclidean spaces are second-countable.
- To wit, the set of all open balls centered at rational points with rational radii forms a countable base.
4. Neighborhood
- or Neighbourhood
4.1. Definition
4.1.1. Of a Point
- For a topological space \(X\) and a point \(p\in X\), the neighborhood of \(p\) is a subset \(V\subset X\) that includes an open set \(U\) containing \(p\), \[ p \in U \subseteq V\subseteq X. \]
- Equivalently, \(p\) is in the topological interior of \(V\).
4.1.2. Of a Set
- For a subset \(S\) of a topological space \(X\), the neighborhood of \(S\) is a set \(V\) that includes an open set \(U\) containing \(S\).
- Equivalently, \(S\) is a subset of the interior of \(V\).
4.2. In a Metric Space
- For a point \(p\) in a metric space \((X, d)\), a set \(V\) is a neighborhood of a point \(p\) if there exists an open ball with center \(p\) and radius \(r>0\) contained in \(V\).
4.2.1. Uniform Neighborhood
- \(V\) is called a uniform neighborhood of a set \(S\) if: \[ \exists r>0, \forall p \in S, B_r(p) \subset V. \]
4.3. Neighborhood System
- Complete System of Neighborhoods, Neighborhood filter
- \(\mathcal{N}(x)\)
- Collection of all neighborhoods of \(x\).
4.4. Neighborhood Basis
- Local Basis, Neighborhood Base, Local Base
- A neighborhood basis for a point \(x\) is a filter base of the
neighbourhood filter.
- It is a subset \(\mathcal{B}\subseteq \mathcal{N}(x)\) such that \(\forall V\in \mathcal{N}(x), \exists B\in \mathcal{B}, B\subseteq V\).
- Equivalently, the neighborhood filter \(\mathcal{N}\) can be
recovered from \(\mathcal{B}\)
- \[ \mathcal{N}(x) = \{V\subseteq X\colon \exists B\in \mathcal{B}, B\subseteq V\}. \]
- A family \(\mathcal{B}\in \mathcal{N}(x)\) is a neighborhood basis for \(x\) if and only if \(\mathcal{B}\) is a cofinal subset of \((\mathcal{N}(x), \supseteq)\) with respect to the partial order \(\supseteq\).
5. Homeomorphism
- Topological Isomorphism, Bicontinuous Function
- Invertible continuous map between two topological spaces: bijective and continuous with continuous inverse.
5.1. Definition
- \( f\colon X \to Y \) is a homeomorphism if:
- \( f \) is a bijection
- \( f \) is continuous
- the inverse function \( f^{-1} \) is continuous
5.2. Examples
- The glued together Möbius strip is homeomorphic to Klein bottle.
6. Compactness
6.1. Definition
- A set \(K\) in topological or metric space is compact, if every open cover of \(K\) has finite subcover.
6.2. Properties
- Compact set behave like finite set in topological sense.
- It make local properties into a global ones.
- In extreme value theorem, boundedness of \(f\) in a neighborhood of \(x\in [a, b]\) implies the boundedness of \(f\) on \([a,b]\).
6.3. Sequentially Compact
- Equivalently, except few rare cases, every sequence in \(K\) has convergent subsequence.
- This is equivalent to complete and total bounded.
- This is essentially saying a sequence cannot diverge, has a limit, and cannot escape to infinite dimensions.
6.4. Locally Compact
6.4.1. Weakly Locally Compact
- Every point of \(X\) has a compact neighborhood
6.4.2. Locally Relatively Compact
- Strongly Locally Compact
- Every point of \(X\) has a closed compact neighborhood.
- Equivalently,
- Every point of \(X\) has a relatively compact neighborhood.
- Every point of \(X\) has a local base of relatively compact neighborhoods.
6.4.3. Locally Compact Regular
- Both locally compact and regular.
- Equivalently, every point of \(X\) has a local base of closed compact neighborhoods.
6.4.4. Locally Compact Hausdorff
- LCH
- In a weakly locally compact Hausdorff space implies that all the local compactness are equivalent.
6.5. Countably Compact
- A topological space is called countably compact if every countable open cover has a finite subcover.
6.6. σ-Compact
- A space is σ-compact if it is the union of countably many compact subspaces.
6.6.1. σ-Locally Compact
- A space that is both σ-compact and (weakly) locally compact.
6.7. Lindelöf Space
6.7.1. Definition
- A topological space in which every open cover has a countable subcover.
6.7.2. Properties
- Every σ-compact space is Lindelöf.
- A Lindelöf space is compact if and only if it is countably compact.
- Every second-countable space is Lindelöf. The converse is not true.
- A metric space is Lindelöf if and only if it is separable, and if and only if it is second-countable.
- Every regular Lindelöf space is normal
- Every regular Lindelöf space is paracompact
6.8. Paracompact
6.8.1. Locally Finite
- A collection \(\mathcal{B}\) of subsets of topological space \(X\)
is said to be locally finite, if
- each point in the space has a neighborhood that intersects only finitely many of the sets in the collection.
- \(\forall x\in X, \exists N\in \mathcal{N}(x), |\{B\in \mathcal{B}\mid N\cap B \neq \varnothing\}| < \infty\)
6.8.2. Refinement
- A refinement \(\mathcal{D}\) of a cover \(\mathcal{C}\) of a space
\(X\) is a new cover of the same space such that
- every set in the new cover is a subset of some set in the old cover.
- \[ \forall V \in \mathcal{D}, \exists U\in \mathcal{C}, V\subseteq U \]
6.8.3. Definition
- Every open cover of a topological space \(X\) has an locally finite open refinement.
6.8.4. Properties
- Every compact space is paracompact
- Every regular Lindelöf space is paracompact. In particular, every locally compact second-countable space is paracompact.
7. Separation Axioms
- Tychonoff Separation Axioms
7.1. Topologically Distinguishable
- Two points in \(X\) are topologically distinguishable, if at least one of them has a neighborhood that is not a neighborhood of the other.
7.2. Separated
- Two points are separated if each of them has a neighborhood that is not a neighborhood of the other.
7.3. Separated Subset
- For subsets \(A\) and \(B\):
7.3.1. Separated by Neighborhoods
- They have disjoint neighborhoods.
7.3.2. Separated by Closed Neighborhoods
- They have disjoint closed neighborhoods
7.3.3. Separated by Continuous Function
- There exists a continuous function \(f\) from the space \(X\) to the real line \(\mathbb{R}\) such that \(A\) is a subset of the preimage \(f^{-1}[\{0\}]\) and \(B\) is a subset of the preimage \(f^{-1}[\{1\}]\).
7.3.4. Precisely Separated by Continuous Function
- There exists a continuous function \(f: X \to \mathbb{R}\) such that \(A\) equals the preimage \(f^{-1}[\{0\}]\) and \(B\) equals \(f^{-1}[\{1\}]\).
7.4. Definitions
- T• are the Kolmogorov Classification.
- Inverse Hasse diagram

- P: Perfectly, C: Completely, N: Normal, R: Regular
- Non-T0 on the left, T0 on the right.
- The Kolmogorov quotient, quotient space under the equivalence relation of topological indistinguishability, of the left side is the right side.
- If a space satisfies two axioms simultaneously, then the space satisfies all the axioms up to the supremum of the two.
Separated Separated by Separated by closed Separated by function Precisely separated by neighborhoods neighborhoods function Distinguishable points Symmetric Preregular
Distinct points Fréchet Hausdorff Urysohn Completely Hausdorff Perfectly Hausdorff
Closed set and point Symmetric Regular Completely regular Perfectly normal outside
Disjoint closed sets always Normal Perfectly normal
Separated sets always Completely normal discrete space
7.4.1. Kolmogorov (T₀)
- Two distinct points in \(X\) are topologically distinguishable.
7.4.2. Symmetric (R₀)
- Two distinguishable points in \(X\) are separated.
7.4.3. Fréchet (T₁)
- Accessible
- Two distinct points in \(X\) are separated.
7.4.4. Preregular (R₁)
- Two topologically distinguishable in \(X\) are separated by neighbourhoods.
7.4.5. Hausdorff (T₂)
- Separated Space, T₂ Space
- Two distinct points in \(X\) are separated by neighbourhoods.
- Named after Felix Hausdorff
7.4.5.1. Equivalences
- \(X\) is a Hausdorff space.
- Limits of nets in \(X\) are unique.
- Limits of filters on \(X\) are unique.
- Any singleton set \(\{x\}\subset X\) is equal to the intersection of all closed neighbourboods of \(x\).
- The diagonal \(\Delta = \{(x, x) \mid x\in X\}\) is closed as a subset of the product space \(X\times X\).
- Any injection from the discrete space with two points to \(X\) has the lifting property with respect to the map from the finite topological space with two open points and one closed point to a single point.
7.4.6. Urysohn (T₂½)
- Two distinct points in \(X\) are separated by closed neighbourhoods.
7.4.7. Completely Hausdorff (Completely T₂)
- Two distinct points in \(X\) are separated by a continuous function.
7.4.8. Regular
- Any point \(x\) and closed set \(F\subset X\) with \(x\not\in F\), are separated by neighbourhoods.
7.4.9. Regular Hausdorff (T₃)
- Both T0 and Regular.
7.4.10. Completely Regular
- Any point \(x\) and closed set \(F\subset X\) with \(x\not\in F\), are separated by a continuous function.
7.4.11. Tychonoff (T₃½)
- Completely T3, Completely Regular Hausdorff
- Both T0 and Completely Regular.
7.4.12. Normal
- Two disjoint closed subsets of \(X\) are separated by neighbourhoods.
- By the Urysohn's Lemma, those are also separated by a continuous function.
7.4.12.1. Examples
- All compact Hausdorff spaces are normal
7.4.13. Normal Regular
- Both R0 and Normal.
7.4.14. Normal Hausdorff (T₄)
- Both T1 and Normal.
7.4.15. Completely Normal
- CN
- Two separated sets are separated by neighbourhoods.
7.4.16. Completely Normal Hausdorff (T₅)
- Completely T4
- Both Completely Normal and T1.
7.4.17. Perfectly Normal
- PN
- Two disjoint closed sets are precisely separated by a continuous function.
7.4.18. Perfectly Normal Hausdorff (T₆)
- Perfectly T4
- Both Perfectly Normal and T0.
7.4.18.1. Examples
- All metric spaces.
- All pseudometric spaces are perfectly normal regular (PNR).
8. Countability Axioms
8.1. First-Countable
- A space \(X\) is said to be first-countable if each point has a countable neighborhood basis.
8.1.1. Properties
- First-countability is strictly weaker than second-countability.
8.2. Second-Countable
- A topological space \(X\) whose topology has a countable base.
8.3. Separable
- A toposogical space containing a countable dense subset.
8.4. Examples
- Euclidean space with its usual topology is second-countable.
- The long ray is \(\omega_1\times [0,1)\) equipped with the order
topology that arises from the lexicographical order on
\(\omega_1\times [0,1)\).
- It is second-uncountable, but is first-countable.
9. Manifold
9.1. Definition
A topological space \(M\) is a manofold if:
- Either paracompact or second-countable: The space is not pathologically large.
- Hausdorff: Distinct points are seperable by neighborhoods.
- Locally Euclidean: Every point has a neighborhood homeomorphic to an open subset of the Euclidean space.
9.2. Atlas
9.2.1. Chart
- \((U, \varphi)\)
- Pair of an open subset \(U\) of the manifold \(M\) and a homeomorphism \(\varphi: U \to \mathbb{R}^n\).
9.2.2. Definition
- An indexed family of charts \((U_\alpha, \varphi_\alpha)_{\alpha\in I}\), which covers \(M\).
- The dimension of the codomain of \(\varphi\) is the dimension of the manifold.
9.2.3. Transition Map
- For two charts \((U_\alpha, \varphi_\alpha)\) and \((U_\beta, \varphi_\beta)\) with non-empty \(U_\alpha\cap U_\beta\), the transition map: \[ \tau_{\alpha,\beta}: \varphi_\alpha[U_\alpha\cap U_\beta] \to \varphi_\beta[U_\alpha \cap U_\beta]. \] defined by: \[ \tau_{\alpha,\beta} = \varphi_\beta\circ\varphi_\alpha^{-1}. \]
9.3. Differentiable Manifold
- See differentiable manifold.
- A manifold is differentiable, when the transition maps are differentiable.
- Furthermore, if the transition maps are smooth then the atlas is smooth atlas, and the manifold is itself smooth.
9.4. Tangent Bundle
9.4.1. Definition
- The disjoint union of of all tangent spaces of a manifold.
- \[ TM := \bigsqcup_{x\in M}T_xM = \bigcup_{x\in M} \{x\}\times T_xM \]
9.4.2. Section
- A "slice" perpendicular to the vector spaces, which is a vector field on the manifold.
- The set of all sections is notated by \(\Gamma(TM)\).
9.4.3. Properties
- It is a vector bundle, which is a fiber bundle whose fibers are vector space.
9.5. Topological Manifold
- All manifolds are topological manifold.
9.6. Riemannian Manifold
- Riemannian Surface
- \((M, g)\)
9.6.1. Definition
- Smooth manifold \(M\) equipped with positive-definite inner product \(g_p\) on the tangent space \(T_pM\) at each point \(p\).
- The inner product is called the Riemannian metric (tensor).
9.7. Complex Manifold
- Manifold with an atlas of charts to the open unit disc in \(\mathbb{C}^n\) , such that the transition maps are holomorphic.
- Intuitively, complex differentiable manifold.
9.9. Cauchy-Riemann Manifold
- CR Manifold
9.9.1. Definition
- differentiable manifold with a complex
subbundle \(L\) of the complexified tangent bundle such that
- \([L,L]\subseteq L\)
- \(L\cap \overline{L} = \{0\}\)
10. Fiber Bundle
- Fiber bundle is a space that is locally a product space, but globally may have different topological structure.
10.1. Definition
- \((E, B, \pi, F)\)
- \(F\longrightarrow E \xrightarrow{\pi} B\)
- In analogy with a exact sequence
- The base space \(B\) is a connected topological space, and the
total space \(E\) and the fiber \(F\) are topological spaces, and the map \(\pi\colon E\to B\) is a
continuous surjection satisfying a local triviality:
- For every \(x\in B\), there exists an open neighborhood \(U\subseteq B\) of \(x\), called trivializing neighborhood, such that there exists a homeomorphism \(\varphi\) for the following commutative diagram:
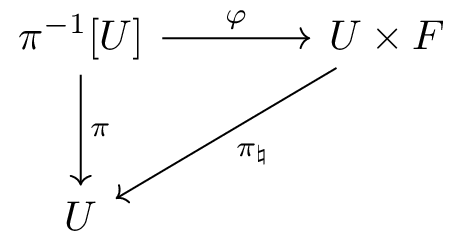
- where \(\pi^{-1}[U]\) is given the subspace topology, and \(U\times F\) is given the product topology, and \(\pi_\natural\) is the natural projection.
10.1.1. Local Trivialization
- The set \(\{(U_i, \varphi_i)\}_{i\in I}\) of all pairs of the trivializing neighborhood \(U_i\) and the corresponding homeomorphism \(\varphi_i\) is called a local trivialization of the bundle.
10.1.2. Fiber over a Point
- For any point \(p\in B\), the preimage \(\pi^{-1}[\{p\}]\) is homeomorphic to \(F\) and is called the fiber over \(p\).
10.2. Projection
- Submersion
10.2.1. Definition
- \(\pi: E \to B\) where \(E\) is the fiber bundle, and \(B\) is the base space.
- Projection is used to relate the fiber bundle \(E\) to the product space \(E\times F\).
11. CW Complex
Cellular Complex, Cell Complex
It simultaneously generalizes manifolds and simplicial complexes.
11.1. Definition
The union \( \cup_k X_k \) of a sequence of topological spaces \[ \varnothing = X_{-1} \subset X_0 \subset X_1 \subset \cdots \] such that each \( X_k \) is gluing of copies of \( k \)-cells \( (e_{\alpha}^k)_{\alpha} \) to \( X_{k-1} \) by continuous attaching map \( g_{\alpha}^k \colon \partial e_{\alpha}^k \to X_{k-1} \). Note that \( k \)-cell \( e_{\alpha}^k \) is each homeomorphic to the open \( k \)-ball.
Each \( X_k \) is called the k-skeleton of the complex.
11.2. Examples
- 0-dimensioanl
- Every discrete topological space
- 1-dimensional
- Interval
- Circle
- Graph
- Finite-dimensional
- n-dimensional sphere
- n-dimensional real projective space
- Polyhedra
- Differentiable Manifolds
11.3. Chain
m-chain is a formal linear combination of m-cells: \[ \Sigma = \sum_i n_i \sigma_i \] defined to follow the integration rule \[ \int_{\Sigma} \omega = \sum_i n_i \int_{\sigma_{i}} \omega. \]
12. Euler Characteristic
- \(\chi\)
Originally defined for polyhedra as \(\chi = V - E + F\).
12.1. Topological Definition
- For any finite CW-complex, the Euler characteristic can be defined as the alternating sum: \[ \chi = k_0 - k_1 + k_2 - k_3 + \cdots \] where \(k_n\) denotes the number of cells of dimension \(n\) in the complex.
12.2. Euler's Polyhedron Formula
- Any surface of a convex polyhedron has Euler characteristic of 2: \[ \chi = V - E + F = 2. \]
13. References
- This open problem taught me what topology is - YouTube
- Topological space - Wikipedia
- Product topology - Wikipedia
- Base (topology) - Wikipedia
- Neighbourhood (mathematics) - Wikipedia
- Neighbourhood system - Wikipedia
- Separation axiom - Wikipedia
- Kolmogorov space - Wikipedia
- Hausdorff space - Wikipedia
- First-countable space - Wikipedia
- Second-countable space - Wikipedia
- Axiom of countability - Wikipedia
- Long line (topology) - Wikipedia
- Homeomorphism - Wikipedia
- You Could Have Invented Homology, Part 1: Topology | Boarbarktree - YouTube
- Compact space - Wikipedia
- Locally compact space - Wikipedia
- Countably compact space - Wikipedia
- σ-compact space - Wikipedia
- Lindelöf space - Wikipedia
- Locally finite collection - Wikipedia
- The Concept So Much of Modern Math is Built On | Compactness - YouTube
- Atlas (topology) - Wikipedia
- Differentiable manifold - Wikipedia
- CR manifold - Wikipedia
- Tangent bundle - Wikipedia
- Section (fiber bundle) - Wikipedia
- Riemannian manifold - Wikipedia
- Riemann surface - Wikipedia
- Fiber bundle - Wikipedia
- CW complex - Wikipedia
- Euler characteristic - Wikipedia